KAIST 조천식모빌리티대학원 공승현 교수 연구팀이 세계 최초로 악천후 상황에서 안정적인 자율주행을 가능하게 하는 4D 레이더(Radar)의 주변 객체 인지 인공지능 기술을 개발했습니다. 연구팀은 구축된 인공지능 학습 데이터셋(Dataset)인 KAIST-레이더(이하 K-레이더)와 개발된 인공지능 신경망(RTN4D) 그리고 전 세계 연구자를 위한 4D 레이더 인공지능 개발 플랫폼(Platform)과 관련 벤치마크(Benchmark)를 모두 공개한다고 전했습니다.
현재 전 세계적으로 개발되고 있는 자율주행 자동차는 주로 카메라와 라이다(LiDAR)에서 출력되는 이미지와 포인트 클라우드(Pointcloud) 데이터를 적절한 인공지능 신경망으로 처리해 자동차 주변의 객체들을 인식하는 방식으로 구현돼 있습니다. 그러나 카메라와 라이다는 각각 가시광선과 적외선을 사용하므로 눈비 또는 안개 상황에서 측정 성능이 크게 떨어지는데요. 이로 인해 주변 객체들에 대한 인식이 어려워져 안전한 자율주행이 불가능합니다.
더구나, 차내에 설치할 수 있는 카메라와 달리 자동차의 지붕에 설치하는 라이다는 외부 환경에 노출돼 있어서 그 표면에 눈비 또는 흙먼지가 묻는 경우 라이다를 이용한 전방 탐지가 불가능해집니다. 공승현 교수는 "젖은 도로에서 전방에 주행 차량이 있는 경우, 그 바퀴에서 일어나는 흙먼지가 섞인 물보라로 라이다 표면이 빠르게 더럽혀지고, 결과적으로 모든 전방 객체에 대한 라이다 측정이 불가능해진다ˮ고 설명했습니다.

적외선을 사용하는 라이다와는 달리 77기가헤르츠(GHz) 대역의 자동차 레이더는 눈, 비, 안개 등의 악천후 상황에 매우 강건하며 표면에 눈비나 흙먼지가 묻은 상황에서도 안정적인 측정 결과를 나타냅니다. 최근에는 고해상도의 4D 레이더(대상까지의 거리, 방위각, 높이, 도플러 주파수를 측정)가 개발돼 상용화되고 있고, 그 성능도 빠르게 향상되는 상황입니다.
이에 따라서 전 세계적으로 4D 레이더에 인공지능을 이용한 주변 인지 기술 연구가 시작되고 있습니다. 하지만, 4D 레이더에 필요한 인공지능 연구는 매우 더디게 진행되고 있는데요. 카메라나 라이다와 달리, 고성능 인공지능 개발에 필수적인 충분한 데이터셋이 구축되지 못하고 있기 때문입니다. 2021년부터 4D 레이더의 포인트 클라우드 데이터셋이 일부 공개됐으나, 데이터의 양이 충분하지 않고 측정치가 매우 희소해 신뢰할 만한 객체 인식 인공지능 신경망 개발이 쉽지 않습니다.
연구팀이 공개하는 K-레이더는 악천후를 포함한 다양한 날씨 및 교통 상황에서 수집된 다양성 높은 데이터셋입니다. 정확히 동기된 카메라와 라이다 측정 데이터와 함께 구축된 13테라바이트(TB)에 이르는 대용량으로 세계 최초의 4D 레이더 데이터셋입니다. 특히, K-레이더는 포인트 클라우드 형태가 아닌 인공지능 신경망의 성능을 극대화할 수 있는 텐서(Tensor) 형태의 데이터셋으로, 이는 일반적인 레이더의 잡음 제거 방식을 사용하지 않아 잡음 수준의 미약한 미세 측정치를 온전히 담고 있는 형태입니다.
연구팀이 개발한 4D 레이더 인공지능 신경망(RTN4D)은 K-레이더로 수많은 학습을 진행했고, 그 결과 다양한 날씨와 도로 상황에서 70m 이내의 객체에 대해 객체 판별, 위치 추정 및 주행 방향 추정의 3가지 추정을 정확히 수행하는 경우가 최종 62.5%인 세계 최고의 성능을 보여주는데요.
또한, 연구팀은 전 세계의 연구자들이 자체적으로 데이터를 추가 구축하고 신경망 기술을 개발하며 그 성능을 자체 평가할 수 있도록 레이더용 인공지능 신경망 개발 플랫폼과 벤치마크도 공개 제공합니다.
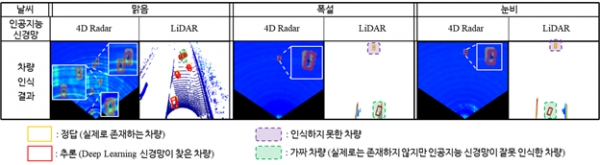
KAIST 조천식모빌리티대학원 공승현 교수는 "눈이나 비가 오는 날씨에서 4D 레이더 인공지능 신경망은 기존 라이다 인공지능 신경망 보다 훨씬 더 안정적인 주변 객체 인지 성능을 갖는데, 이는 4D 레이더가 악천후에서 자율주행을 위한 필수 센서임을 보여주는 결과이며, 최근 미국의 웨이모(Waymo)와 이스라엘의 모빌아이(Mobileye)가 수년 내로 4D 레이더를 자율주행의 주요 인지 센서로 활용할 계획임을 공개적으로 밝힌 이유다ˮ라며 "우리 연구팀이 공개한 K-레이더와 4D 레이더 인공지능 개발 플랫폼 및 벤치마크를 통해, 향후 4D 레이더에 관한 인공지능 연구가 더욱 활발히 진행될 것으로 기대한다ˮ라고 말했습니다.
K-레이더, 4D 레이더 인공지능 신경망(RTN4D), 4D 레이더 인공지능 개발 플랫폼과 벤치마크는 연구실 홈페이지(http://ave.kaist.ac.kr/)와 깃허브(https://github.com/kaist-avelab/K-Radar)를 통해서 배포될 예정입니다.
